

電力液壓抱閘制動器的具體情況,如有松動 將電力液壓制動器調節桿收緊 在調緊彈簧壓力就可以了,如抱閘剎車片磨損就要更換了,有個別抱閘輪尺寸變小也需更換,使用時間較長的抱閘建議更換新的,確保致電安全性。電動機通電后,活塞的葉輪軸和電動機的空心軸上的導套相銜接,當電動機旋轉時,離心泵中產生較高的壓力,推動活塞上升,此時,油液是從活塞的上腔經過管道被擠入活塞的下腔,迫使活塞和固定在活塞上的推桿一起上升,這樣就完成了整個動作過程。MYT2型(Ed型)電力液壓推動器電動機裝在器身下部,內部不浸油,旋轉方向可任意,正反轉更換頻率高,升降時間可無級調整,能長時間適應較惡劣的工作環境。根據需要可加裝調節閥、行程開關、加熱器以及制動彈簧和阻尼彈簧等裝置。
 車間使用的雙梁橋式起重機起升機構一般采用液壓制動器,工作時需要根據工作的要求將其進行調整,制動器的調整主要包括制動力矩的調整、瓦塊退距(推動器補償行程Hb)的調整和退距均等的調整。對于帶自動補償裝置制動器來說,各項調整主要在初裝時(使用前)和更換新的摩擦襯墊后需要進行。在使用過程中如無異常現象,一般無需調整。小編為大家介紹下雙梁橋式起重機液壓制動器怎么調。
車間使用的雙梁橋式起重機起升機構一般采用液壓制動器,工作時需要根據工作的要求將其進行調整,制動器的調整主要包括制動力矩的調整、瓦塊退距(推動器補償行程Hb)的調整和退距均等的調整。對于帶自動補償裝置制動器來說,各項調整主要在初裝時(使用前)和更換新的摩擦襯墊后需要進行。在使用過程中如無異常現象,一般無需調整。小編為大家介紹下雙梁橋式起重機液壓制動器怎么調。
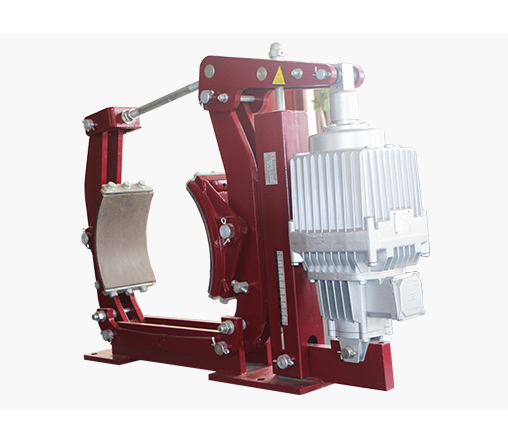
雙梁橋式起重機常用制動器結構
1、瓦塊退距的調整
調節瓦塊退距,事實上也是調節推動器的行程。在制動器中,擰松防松螺母,順時針擰緊制動拉桿則增大推動器補償行程,反之則減少推動器補償行程。把補償行程調節至規定值即可。若推動器補償行程調得太大,就需要擰出補償緊定螺栓,取出補償套,此時撥銷不受三角板的阻礙,可以逆時針自由轉動。這時就可以再逆時針擰松制動拉桿,后復原,重新調整補償行程和自動補償裝置。
2、瓦塊退距均等的調整
瓦塊退距均等裝置一般不需要進行調整,只是在初次或者重新安裝后才需要調整。方法是,手動或者電動打開制動器,觀察左右的瓦塊退距。如果右邊的瓦塊退距大于左邊的瓦塊退距,就擰松左側的緊定螺母,順時針轉動調節螺栓(或者擰松右側的緊定螺母,逆時針轉動調節螺栓),觀察左右瓦塊退距的變化。若不等,則繼續,直到相等為止。均等杠桿應該處于大致水平狀態,否則,需要移動制動器底座的位置,使制動器中心線與制動輪中心線大致重合。
3、制動力矩的調整
制動力矩的調整很簡單,只需調整力矩螺母。一般地,用扳手順時針擰力矩調節螺母彈簧長度變短,制動力矩增大,反之亦然。彈簧長度不可超過力矩標尺上的上、下示線,否則,很可能會損壞彈簧,致使制動器工作失靈,甚至造成安全事故!
4、制動襯墊磨損自動補償裝置的調整
(1)把補償裝置撥銷往下壓到底部(與補償套內圈的下表面接觸)。
(2)擰松緊定螺栓,直至其下端面處在補償套的內圈之外。
(3)手動或者自動抬起推動器推桿,此時撥銷被帶起。然后手動釋放或者給推動器斷電,使推桿在制動彈簧下的作用下復位,此時撥銷的位置會被往下壓一點。
(4)往下擰緊定螺栓,直至其下端面與撥銷基本接觸為止,緊固緊定螺母。

自動補償裝置至此調整完畢。本文就是在電力液壓推桿制動器的基礎上,以起重機大車運行機構為對象,研究了模糊控制這種智能控制技術在制動領域中的應用。論文首先介紹了相關課題的研究現狀、智能控制技術和模糊控制技術。然后針對電力液壓推桿制動器設計了模糊控制與變頻調速技術相結合的控制方案,建立了模糊制動控制器的開環控制系統,研究其模糊控制算法和決策準則。然后將模糊控制與傳統PID技術相結合,建立了模糊PID閉環制動控制系統,并與傳統PID控制技術相比較。后進行系統仿真和結果分析,得出模糊控制能有效地改善電力液壓推桿制動器的制動性能的結論








